
실험실 소개
국립금오공과대학교 지능로보틱스연구실은 로보틱스, 메카트로닉스 그리고 지능제어 분야의 기초 학문을 연구하고, 다양한 고급 기술을 실제 현장에 적용할 수 있도록 개발하는 곳입니다. 지능형 로봇(Intelligent Robots)이란 외부환경을 인식(Perception)하고, 스스로 상황을 판단(Cognition)하여, 자율적으로 동작(Manipulation)하는 로봇입니다. 지능형 로봇이 기존의 로봇과 차별화되는 것은 상황판단 기능과 자율동작 기능이 추가된 점인데, 기존의 로봇에 초음파, 적외선, 비전센서 등 다양한 센서를 사용하여 주위의 환경을 인식하고 컴퓨터로 환경을 분석하며, 분석된 자료로 스스로 동작하면서 변화하는 환경에 맞추어 피드백되어 기계의 파손을 막거나 작업의 효율성을 증대시켜 생산성을 상승시키는 로봇입니다. 연구실에서는 기존의 지능로봇을 분석하고 나아가 더욱 좋은 성능의 로봇을 개발하는데 초점을 맞추고 있으며 다양한 연구과제를 진행하여 많은 성과를 달성하고 있습니다.
주요 연구 분야
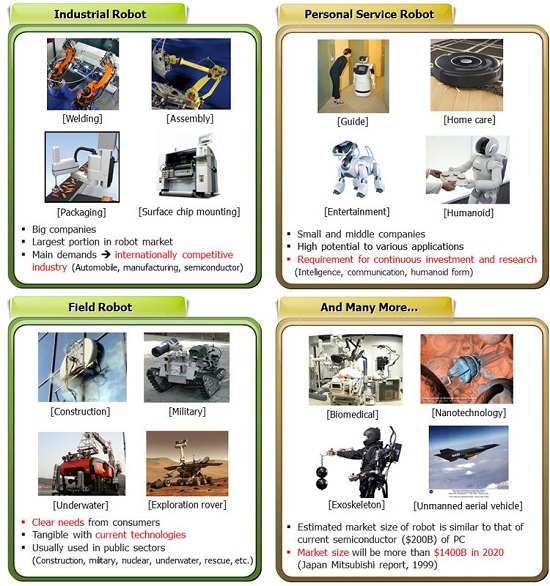
지능로보틱스 연구실에서는 로봇에 스스로 판단하고 운영할 수 있는 시스템을 구축하여 자동화, 효율화를 통한 생산능력과 편의성의 극대화를 연구하고 있습니다. 또 스스로 움직이는 로봇이라는 점에서 위험한 작업이나 인간이 수행하기 힘든 작업에도 활용할 수 있습니다. 지능로봇은 실내뿐만 아니라 야외에서 사용할 수 있는 다양한 기계에 접목할 수 있어 무한한 적용분야를 가질 수 있습니다.
교수님 소개
주백석
- 소 속: 기계공학부(기계시스템공학전공)
- 연구실: 테크노관 239호
- 연락처: ☎054-478-7398
- E-mail: bschu@kumoh.ac.kr
- Homepage: http://irobot.kumoh.ac.kr
- 실험실(테크노관 141호,054-478-7403) 및 학생연구실(테크노관 455호, 054-478-7406)
- 1995.3~1999.2 고려대학교 기계공학과 (공학사)
- 1999.9~2001.8 고려대학교 기계공학과 (공학석사)
- 2001.9~2006.2 고려대학교 기계공학과 (공학박사)
- 2006.4~2006.9 고려대학교 기계공학과 (연구조교수)
- 2006.10~2007.9 UC Davis 기계항공공학과 (Post-doctor)
- 2007.10~2011.2 고려대학교 기계공학과 (연구교수)
- 2011.3~현재 국립금오공과대학교 기계시스템공학부 (교수)
주요 논문 및 특허
- Baeksuk Chu, Kyungmo Jung, Myo-Taeg Lim, Daehie Hong, “Robot-based construction automation: An application to steel beam assembly (Part I),” Automation in Construction, Vol. 32, pp. 46-61, 2013.
- Kyungmo Jung, Baeksuk Chu, Shinsuk Park, Daehie Hong, “An implementation of a teleoperation system for robotic beam assembly in construction,” International Journal of Precision Engineering and Manufacturing, Vol. 14, No. 3, pp. 351-358, 2013.
- Kyungmo Jung, Baeksuk Chu, Daehie Hong, “Robot-based construction automation: An application to steel beam assembly (Part II),” Automation in Construction, Vol. 32, pp. 62-79, 2013.
- Baeksuk Chu, Keunwoo Jung, and Jooyoung Park, “Kernel-based Actor-critic Approach with Applications,” International Journal of Fuzzy Logic and Intelligent Systems, Vol. 11, No. 4, pp. 267-274, 2011.
- Baeksuk Chu, Jooyoung Park, and Daehie Hong, “Tunnel Ventilation Controller Design Using an RLS-Based Natural Actor-Critic Algorithm,” International Journal of Precision Engineering and Manufacturing, Vol. 11, No. 6, pp. 829-838, 2010.
- Baeksuk Chu, Kyungmo Jung, Chang-Soo Han, and Daehie Hong, “A Survey of Climbing Robots: Locomotion and Adhesion,” International Journal of Precision Engineering and Manufacturing, Vol. 11, No. 4, pp. 633-647, 2010.
- Kihyeon Bae, Kyungmo Jung, Baeksuk Chu, Daehie Hong, Hoonjai Chun, Yongsik Kim, and Bora Keum, “Development of Successive Suturing Instrument for Endoscope Using Beads and Side Suction Cap,” International Journal of Precision Engineering and Manufacturing, Vol. 10, No. 2, pp. 97-103, 2009.
- Baeksuk Chu, Daehie Hong, and Jooyoung Park, “Tunnel Ventilation Control via an Actor-Critic Algorithm Employing Nonparametric Policy Gradients,” Journal of Mechanical Science and Technology, Vol. 23, No. 2, pp.311-323, 2009.
- Steven A. Velinsky, Baeksuk Chu, and Ty A. Lasky, “Kinematics and Efficiency Analysis of the Planetary Roller Screw Mechanism,” Journal of Mechanical Design, Vol. 131, No. 1, pp. (011016-1)-(011016-8), 2009.
- Baekasuk Chu, Daehie Hong, Jooyoung Park, and Jae-Hun Chung, “Passive Dynamic Walker Controller Design Employing an RLS-Based Natural Actor-Critic Learning Algorithm,” Engineering Applications of Artificial Intelligence Vol. 21, No. 7, pp. 1027-1034, 2008.
- Baeksuk Chu, Dongnam Kim, and Daehie Hong, “Robotic Automation Technologies in Construction: A Review,” International Journal of Precision Engineering and Manufacturing, Vol. 9, No. 3, pp. 85-91, 2008.
- Baekasuk Chu, Dongnam Kim, Daehie Hong, Jooyoung Park, Jin Taek Chung, Jae-Hun Chung, and Tae-Hyung Kim, “GA-Based Fuzzy Controller Design for Tunnel Ventilation Systems,” Automation In Construction, Vol. 17, Issue 2, pp. 130~136, 2008.
- Baekasuk Chu, Dongnam Kim, Daehie Hong, Jooyoung Park, Jin Taek Chung, and Tae-Hyung Kim, “Tunnel Ventilation Control Using Reinforcement Learning Methodology,” JSME International Series C-MECHANICAL SYSTEMS MACHINE ELEMENTS AND MANUFACTURING, Vol. 49, No. 4, pp. 1003-1010, 2006.
- Daehie Hong, Woo-Chang Lee, Baekasuk Chu, Tae-Hyung Kim, and Woo Chun Choi, “Gantry Robot with Extended Workspace for Pavement Sign Painting Operations,” Journal of Mechanical Science and Technology, Vol. 19, No. 6, pp. 1268~1279, 2005.
- Baekasuk Chu, Sungsoo Kim, Daehie Hong, Heung-Keun Park, and Jinmoo Park, “Optimal Cross-Coupled Synchronizing Control of Dual-Drive Gantry System for a SMD Assembly Machine,” JSME International Series C-MECHANICAL SYSTEMS MACHINE ELEMENTS AND MANUFACTURING, Vol. 47, No. 3, pp. 939-945, 2004.
- Daehie Hong, Baekasuk Chu, Woo Dong Kim, Jin Taek Chung, and Tae-Hyung Kim, “Pollution Level Estimation for Tunnel Ventilation,” JSME International Series B-FLUIDS AND THERMAL ENGINEERING, Vol. 46, No. 2 pp. 278-286, 2003.
- 철골 구조물 볼팅 장치 및 이를 제어하는 방법 (홍대희, 박신석, 임묘택, 주백석, 정경모, 배기현, 추용수) 등록번호 10-1191533 / 등록일자 2012년10월09일
- 볼트 공급 모듈 및 이를 이용한 철골 구조물을 형성하는 철재빔들 간의 볼트 체결을 위한 볼트 공급 장치 (홍대희, 박신석, 임묘택, 주백석, 정경모, 배기현, 추용수) 등록번호 10-1114903 / 등록일자 2012년02월03일
- > 와이어 교차식 캐빈 이송장치 (홍대희, 박신석, 임묘택, 주백석, 정경모, 배기현, 추용수) 등록번호 10-1104518 / 등록일자 2012년01월03일
- 수치방정식의 보정계수를 적용한 터널 내의 소요환기량산출방법 (김태형, 황인주, 이홍철, 금재성, 김진, 홍대희, 주백석, 김동남) 등록번호 10-0921478 / 등록일자 2009년10월06일
- 다중 터널 통합 제어 시스템 및 이의 제어방법 (김태형, 황인주, 이홍철, 금재성, 김진, 홍대희, 주백석, 김동남) 등록번호 10-0873722 / 등록일자 2008년12월05일
주요 연구 과제
- Baeksuk Chu, Kyungmo Jung, Myo-Taeg Lim, Daehie Hong, “Robot-based construction automation: An application to steel beam assembly (Part I),” Automation in Construction, Vol. 32, pp. 46-61, 2013.
- Kyungmo Jung, Baeksuk Chu, Shinsuk Park, Daehie Hong, “An implementation of a teleoperation system for robotic beam assembly in construction,” International Journal of Precision Engineering and Manufacturing, Vol. 14, No. 3, pp. 351-358, 2013.
- Kyungmo Jung, Baeksuk Chu, Daehie Hong, “Robot-based construction automation: An application to steel beam assembly (Part II),” Automation in Construction, Vol. 32, pp. 62-79, 2013.
- Baeksuk Chu, Keunwoo Jung, and Jooyoung Park, “Kernel-based Actor-critic Approach with Applications,” International Journal of Fuzzy Logic and Intelligent Systems, Vol. 11, No. 4, pp. 267-274, 2011.